Jingao Xu|徐京傲

Assistant Professor, ECE
E-mail: jingaoxu@hku.hk
Office: CB-612
The University of Hong Kong
Pok Fu Lam, Hong Kong SAR
I am currently a tenure-track Assistant Professor at the Department of Electrical and Computer Engineering (ECE), the University of Hong Kong (HKU). Previously, I was a postdoctoral researcher at the Computer Science Department of Carnegie Mellon University working with Prof. Mahadev Satyanarayanan. I received both my B.E. (2017) and Ph.D. (2022) degrees with highest honors at the School of Software, Tsinghua University, under the supervision of Prof. Zheng Yang and Prof. Yunhao Liu.
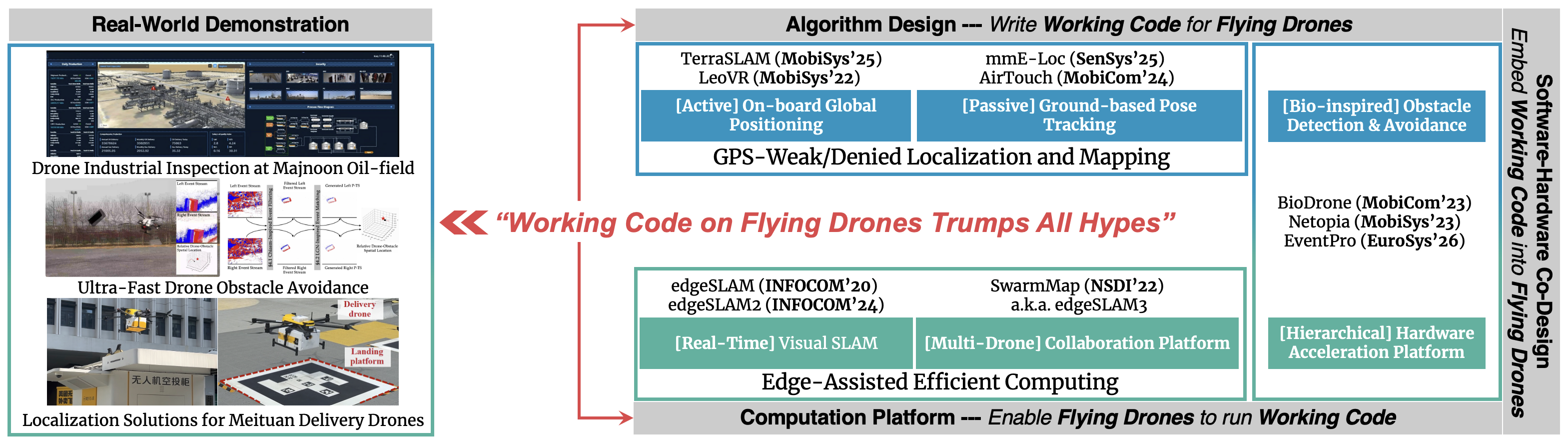
How can cutting-edge CV/AI advances empower running robots, flying drones, and soaring satellites (NOT just excel on datasets or in simulators)? The only way to think this question and validate your answers is building effective mobile systems. To this end, my current research interests include:
- Embodied, Embedded, and Autonomous Systems
- Artificial Intelligence of Things (AIoT), Edge Computing
- Drone-based Systems, Event Camera, Vision Foundation Models
[OPENING] I’m actively seeking highly motivated students to join our group at HKU. See Note to Prospective Students.
News
| Mar, 2026 | Our work SwiftMap on drone-based fast and fully automatic 3D mapping was accepted by ACM MobiSys 2026 |
|---|---|
| Feb, 2026 | Our work x^2-Fusion leveraging event camera for Cross-Modality and Cross-Dimension Flow Estimation got accepted by IEEE/CVF CVPR 2026 |
| Dec, 2025 | Our survey focuses on Event-Camera-based Embedded and Embodied Perception got accepted by ACM CSUR |
| Sep, 2025 | Our benchmarking work trying to answer the fundamental question, Does Accurate Real-Time AI Need Edge Offload?, got accepted by ACM/IEEE SEC 2025 |
| Sep, 2025 | Extended version of TransformLoc and mmE-Loc got accepted by IEEE TMC |
| Sep, 2025 | Our work EventPro got accepted by ACM SenSys 2026. Propeller can now be served as the entry sensing point for drone |
| Sep, 2025 | Our work E-Cube for drone-based integrated computing and communication got accepted by ACM EuroSys 2026 |
| Jul, 2025 | Our work PRE-Mamba on raw-data-level event camera denoising using mamba got accepted by ICCV 2025 |
| Jun, 2025 | VISC, which achieves mmWave-based scene flow estimation with vision supervision is accepted by IEEE/RSJ IROS 2025 |
| Apr, 2025 | Our work TerraSLAM, on GPS-Denied Global Positioning for Drones, got accepted by ACM MobiSys 2025. Extended version of MobiAir got accepted by IEEE TMC |
| Feb, 2025 | Our work mmE-Loc, on accurate landing for Meituan Delivery Drones, got accepted by ACM SenSys 2025 |
| Jul, 2024 | Invited to serve as the Finance Co-Chair of ACM MobiSys 2025. Consider submitting your best works! |
| Jun, 2024 | Extended version of edgeSLAM2 and BioDrone were accepted by IEEE TMC |
| May, 2024 | Our two works RF-Diffusion, on RF-oriented generative AI, and AirTouch, on drone-based real-time computing, got accepted by ACM MobiCom 2024. Each of them received all four badges from Artifact Evaluation |
| Mar, 2024 | Our work MobiAir, on city-level drone-based crowdsourcing, got accepted by ACM MobiSys 2024 |
| Jan, 2024 | Our three works on drone-based computing, edgeSLAM2, EventBoost, and TransformLoc, got accepted by IEEE INFOCOM 2024 |
| Dec, 2023 | Invited to serve as Poster/Demo Co-Chair and Publication Co-Chair of ACM HotMobile 2024 |
| Dec, 2023 | Our work RF-Diffusion got accepted by ACM MobiCom 2024 with shepherding |
| Aug, 2023 | Our work BioDrone got accepted by ACM MobiCom 2023 |
| Jun, 2023 | Invited to serve on the TPC of EAI MobiQuitous 2023 and IEEE ICPADS 2023. |
| Mar, 2023 | ACM SIGCOMM China Doctoral Dissertation Award |